
Супутникова навігація: GPS, ГЛОНАСС і інші

На зміну паперовим картам місцевості прийшли карти електронні, навігація по яким здійснюється за допомогою супутникової системи GPS. З даної статті ви дізнаєтеся, коли з'явилася супутникова навігація, що вдає із себе зараз і що чекає її в найближчому майбутньому.
перші передумови
Під час Другої світової війни у флотилій США і Великобританії з'явився вагомий козир - навігаційна система LORAN, що використовує радіомаяки. По закінченню бойових дій технологію в своє розпорядження отримали цивільні судна «про-західних» країн. Через десятиліття СРСР ввела в експлуатацію свій відповідь - навігаційна система «Чайка», заснована на радіомаяки, використовується донині.

Навігаційний радіомаяк LORAN в Канаді
Але у наземної навігації є істотні недоліки: нерівності земної рельєфу стають перепоною, а вплив іоносфери негативно позначається на часі передачі сигналу. Якщо між навігаційним радіомаяків і судном занадто велику відстань, похибка визначення координат може вимірюватися кілометрами, що неприпустимо.
На зміну наземним радіомаяк прийшли супутникові навігаційні системи для військових цілей, перша з яких - американська Transit (інша назва NAVSAT) - була запущена в 1964 році. Шість низькоорбітальних супутників забезпечували точність визначення координат до двох сотень метрів.
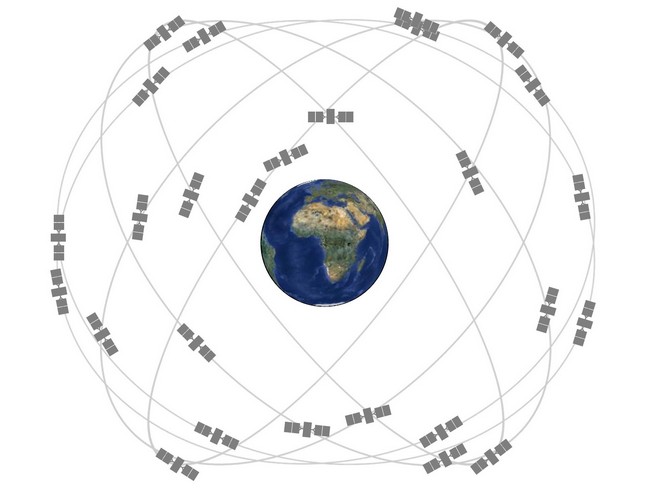
Мережа навігаційних супутників навколо Землі
У 1976 році СРСР запустила аналогічну військову навігаційну систему «Циклон», а через три роки - ще й громадянську під назвою «Цикада». Великим недоліком ранніх систем супутникової навігації було те, що користуватися ними можна було лише короткий час на протязі години. Низькоорбітальні супутники, та ще й в малій кількості, були не здатні забезпечити широке покриття сигналу.
GPS vs. ГЛОНАСС
У 1974 році армія США вивела на орбіту перший супутник нової в той час системи навігації NAVSTAR, яку пізніше перейменували в GPS (Global Positioning System). В середині 1980-х технологію GPS дозволили використовувати цивільним кораблям і літакам, але протягом тривалого часу їм було доступно в рази менше точне позиціонування, ніж військовим. Двадцять четвертий супутник GPS, останній требовавшийся для повного покриття поверхні Землі, запустили в 1993 році.
У 1982 році свою відповідь представила СРСР - їм стала технологія ГЛОНАСС (Глобальна навігаційна супутникова система). Завершальний 24-й супутник ГЛОНАСС вийшов на орбіту в 1995 році, але малий термін експлуатації супутників (три-п'ять років) і недостатнє фінансування проекту майже на десятиліття вивели систему з ладу. Відновити світове покриття ГЛОНАСС вдалося тільки в 2010 році.

ГЛОНАСС - спочатку радянська, а тепер російська альтернатива GPS
Щоб уникнути подібних збоїв, і GPS, і ГЛОНАСС зараз використовують 31 супутник: 24 основних і 7 резервних, як то кажуть, на всякий «пожежний» випадок. Літають сучасні навігаційні супутники на висоті близько 20 тис. Км і за добу встигають двічі облетіти Землю.
Принцип роботи GPS
Позиціонування в мережі GPS проводиться шляхом вимірювання відстані від приймача до декількох супутників, місце розташування яких в поточний момент часу точно відомо. Відстань до супутника вимірюється шляхом множення затримки сигналу на швидкість світла.
Зв'язок з першим супутником дає інформацію лише про сферу можливих розташувань приймача. Перетин двох сфер дасть окружність, трьох - дві точки, а чотирьох - єдино вірну точку на карті. В ролі однієї з сфер найчастіше використовують нашу планету, що дозволяє замість чотирьох супутників позиціонуватися тільки за трьома. В теорії точність позиціонування GPS може досягати 2 метрів (на практиці ж похибка значно більше).

Для точного позиціонування потрібно мінімум три супутники і земну кулю (або четвертий супутник)
Кожен супутник відправляє приймача великий набір інформації: точний час і його поправку, альманах, дані ефемерид і параметри іоносфери. Сигнал точного часу потрібно для вимірювання затримки між його відправкою і прийомом.
Навігаційні супутники оснащуються високоточними цезієвими годинами, тоді як приймачі - куди менш точними кварцовими. Тому для перевірки часу здійснюється контакт з додатковим (четвертим) супутником.

Навігаційний чіп виробництва компанії Leadtek
Але помилятися можуть і цезієві годинник, тому їх звіряють з розміщеними на землі водневими годинами. Для кожного супутника в центрі управління системою навігації індивідуально розраховується поправка часу, яка згодом разом з точним часом відправляється приймача.
Ще одним важливим компонентом системи супутникової навігації є альманах, який представляє собою таблицю параметрів орбіт супутників на місяць вперед. Альманах, як і поправка часу, розраховуються в центрі управління.
Туристичний навігатор Garmin eTrex 10
Передають супутники і індивідуальні дані ефемерид, на основі яких обчислюються відхилення орбіти. А з огляду на що швидкість світла ніде крім вакууму не постійна, в обов'язковому порядку враховується затримка сигналу в іоносфері.
Передача даних в мережі GPS ведеться строго на двох частотах: 1575,42 МГц і 1224,60 МГц. Різні супутники транслюють сигнал на одній і тій же частоті, але використовують кодове розділення каналів CDMA. Тобто сигнал супутника - всього лише шум, розкодувати який можна тільки при наявності відповідного PRN-коду.

Автомобільний навігатор NAVIGON 3300 Max
Вищеописаний підхід дозволяє забезпечити високу стійкість перед перешкодами і використовувати вузький частотний діапазон. Тим неї менше, іноді GPS-приймачів все одно доводиться подовгу шукати супутники, що викликано рядом причин.
По-перше, приймач спочатку не знає, де знаходиться супутник, віддаляється він або наближається і яке зміщення частоти його сигналу. По-друге, контакт із супутником вважається вдалим тільки тоді, коли від нього отримано повний набір інформації. Швидкість же передачі даних в мережі GPS рідко перевищує показник 50 біт / с. А варто сигналу обірватися через радіоперешкод, як пошук починається заново.

Запущений в цьому році експериментальний GPS-супутник USA-242 може похвалитися тривалим часом роботи (понад 10 років) і більш точним позиціонуванням (до півметра)
Майбутнє супутникової навігації
Зараз GPS і ГЛОНАСС широко застосовуються в мирних цілях і, по суті, є взаємозамінними. Новітні навігаційні чіпи підтримують обидва стандарти зв'язку і підключаються до тих супутникам, які знаходять першими.
Американська GPS і російська ГЛОНАСС - далеко не єдині в світі системи супутникової навігації. Наприклад, Китай, Індія і Японія почали розгортати власні ССН під назвою BeiDou, IRNSS і QZSS відповідно, які будуть діяти тільки всередині своїх країн, а тому вимагатимуть порівняно малу кількість супутників.
Але найбільший інтерес, мабуть, викликає проект Galileo, який розробляється Європейським союзом і повинен бути запущений на повну потужність до 2020 року. Спочатку Galileo замислювалася як суто європейська мережа, але про своє бажання взяти участь в її створенні вже заявили країни Близького Сходу і Південної Америки. Так що незабаром на ринку глобальних ССН може з'явитися «третя сила». Якщо і ця система буде сумісна з існуючими, а скоріше за все так і буде, споживачі тільки виграють - швидкість пошуку супутників і точність позиціонування повинні зрости.